整合營銷服務商
電腦端+手機端+微信端=數據同步管理
免費咨詢熱線:

電腦端+手機端+微信端=數據同步管理
免費咨詢熱線:
釋義播報
編輯
學術文獻中的解釋
1、世界坐標系定義為:帶有小圓的圓心為原點ow,xw軸水平向右,yw軸向下,zw由右手法則確定.,v′n為實時圖中對應的統計特征向量
2、是系統的絕對坐標系也稱為世界坐標系.在沒有建立用戶坐標系之前畫面上所有點的坐標都是以該坐標系的原點來確定各自的位置的
3、設一個基準坐標系Xw—Yw—Zw稱為世界坐標系,(xw,yw,zw)為空間點P在世界坐標系下的坐標.(u,v)為P點在圖像直角坐標系下的坐標
4、這個坐標系稱為世界坐標系.計算機對數量化
在AutoCAD中
世界坐標系 用于圖形轉換的起始坐標空間。最大尺寸是 2^32單位高和 2^32 單位寬。
支持縮放、平移、旋轉、變形、投射等轉換操作。
世界坐標系統(WCS)是AutoCAD的基本坐標系。
繪圖期間,原點和坐標軸保持不變。世界坐標系由三個互相垂直并相交的坐標軸X,Y,Z組成。
默認情況下,X軸正向為屏幕水平向右,Y軸正向為垂直向上,Z軸正向為垂直屏幕平面指向使用者。坐標原點在屏幕左下角。
定義播報
編輯
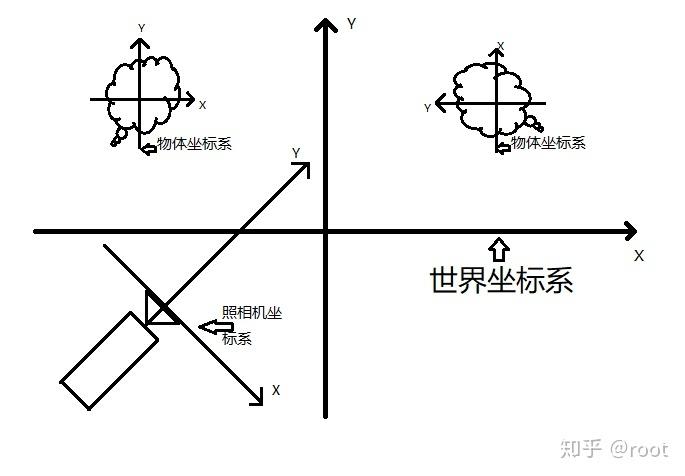
由于攝像機可安放在環境中的任意位置,在環境中選擇一個基準坐標系來描述攝像機的位置,并用它描述環境中任何物體的位置,該坐標系稱為世界坐標系。攝像機坐標系與世界坐標系之間的關系可以用旋轉矩陣與平移向量來描述。
與此相關的是圖像坐標系和攝像機坐標系
圖像坐標系
1.圖像坐標系(Pixel system)
圖4.1
攝像機采集的數字圖像在計算機內可以存儲為數組,數組中的每一個元素(象素,pixel)的值即是圖像點的亮度(灰度)。如圖4.1所示,在圖像上定義直角坐標系u-v,每一象素的坐標(u,v)分別是該象素在數組中的列數和行數。故(u,v)是以象素為單位的圖像坐標系坐標。
2.成像平面坐標系(Retinal system)
由于圖像坐標系只表示象素位于數字圖像的列數和行數,并沒有用物理單位表示出該象素在圖像中的物理位置,因而需要再建立以物理單位(例如厘米)表示的成像平面坐標系x-y,如圖4.1所示。我們用(x,y)表示以物理單位度量的成像平面坐標系的坐標。在x-y坐標系中,原點定義在攝像機光軸和圖像平面的交點處,稱為圖像的主點( point),該點一般位于圖像中心處,但由于攝像機制作的原因,可能會有些偏離,在坐標系下的坐標為(u0,v0),每個象素在x軸和y軸方向上的物理尺寸為dx、dy,兩個坐標系的關系如下:
成像平面坐標系
其中s'表示因攝像機成像平面坐標軸相互不正交引出的傾斜因子(skew factor)。
3.攝像機坐標系(Camera system)
攝像機成像幾何關系可由圖4.2表示,其中O點稱為攝像機光心,軸和軸
與成像平面坐標系的x軸和y軸平行,軸為攝像機的光軸,和圖像平面垂直。光軸與圖像平面的交點為圖像主點O',由點O與軸組成的直角坐標系稱為攝像機坐標系。OO'為攝像機焦距。
圖4.2
4.世界坐標系(World system)
在環境中還選擇一個參考坐標系來描述攝像機和物體的位置,該坐標系稱為世界坐標系。攝像機坐標系和世界坐標系之間的關系可用旋轉矩陣R與平移向量t來描述。由此,空間中一點P在世界坐標系和攝像機坐標系下的齊次坐標分別為和且存在如下關系:
世界坐標系
其中R是3×3的旋轉矩陣,t是3×1的平移向量,
為(0,0,0),M1是兩個坐標系之間的聯系矩陣。
攝像機坐標系
攝影機坐標系的原點為攝像機光心,x軸與y軸與圖像的X,Y軸平行,z軸為攝像機光軸,它與圖像平面垂直,以此構成的空間直角坐標系稱為攝像機坐標系,也稱為相機坐標系,攝像機坐標系是三維坐標系。光軸與圖像平面的交點,即為圖像坐標系的原點,與圖像的X、Y軸構成的直角坐標系即為圖像坐標系,圖像坐標系是二維坐標系。 [1]
*請認真填寫需求信息,我們會在24小時內與您取得聯系。
